Sensores¶
Aqui é tratado a parte específica de montagem e conexões dos sensores.
Pixhawk¶
A pixhawk, que está localizada no compartimento 3, deve receber sinais dos sensores e enviar comandos para os atuadores da vela e do leme. Os sensores padrão que vem no kit pixhawk são um GPS com IMU e o módulo de potencia, que calcula a tensão e corrente a fim de estimar o consumo total da bateria e a carga restante.
No esquema de conexão atual a pixhawk apenas envia os comandos PWM para a placa central, e o sistema implementado nela funciona como uma interface, que recebe um sinal de PWM, traduz para ângulo de vela e leme e comanda os atuadores para levar por a vela e o leme na posição desejada. Como há essa separação entre pixhawk e atuadores, a pixhawk não tem acesso a informações importantes como consumo e posição dos atuadores.
Desta forma, existe uma cominicação serial entre a pixhawk e o driver dos atuadores onde a pixhawk:
- Envia sinais de PWM;
- Recebe estado dos atuadores (consumo, posição, velocidade de rotação);
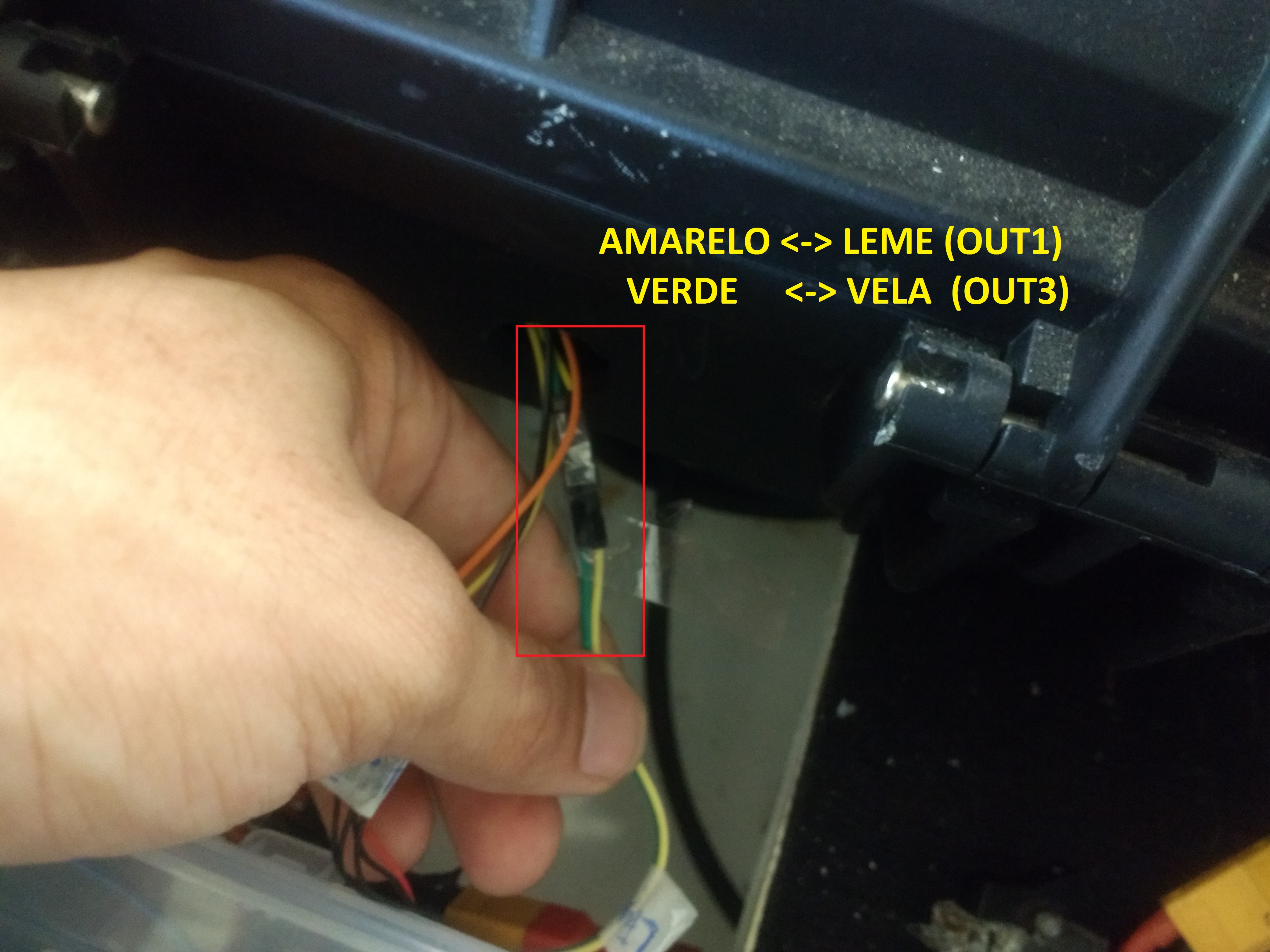
A conexão para envio de sinais de PWM é mostrada abaixo.
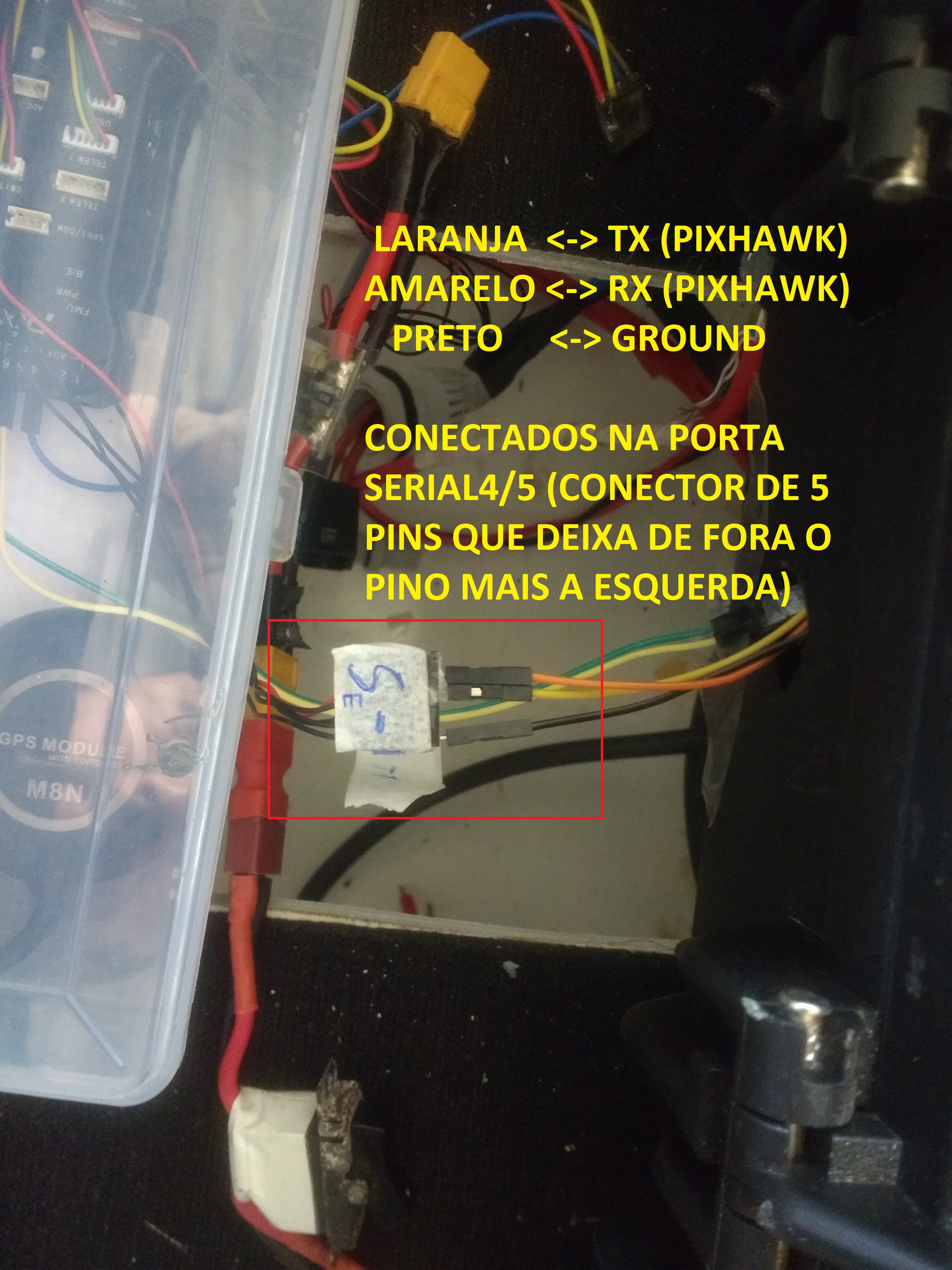
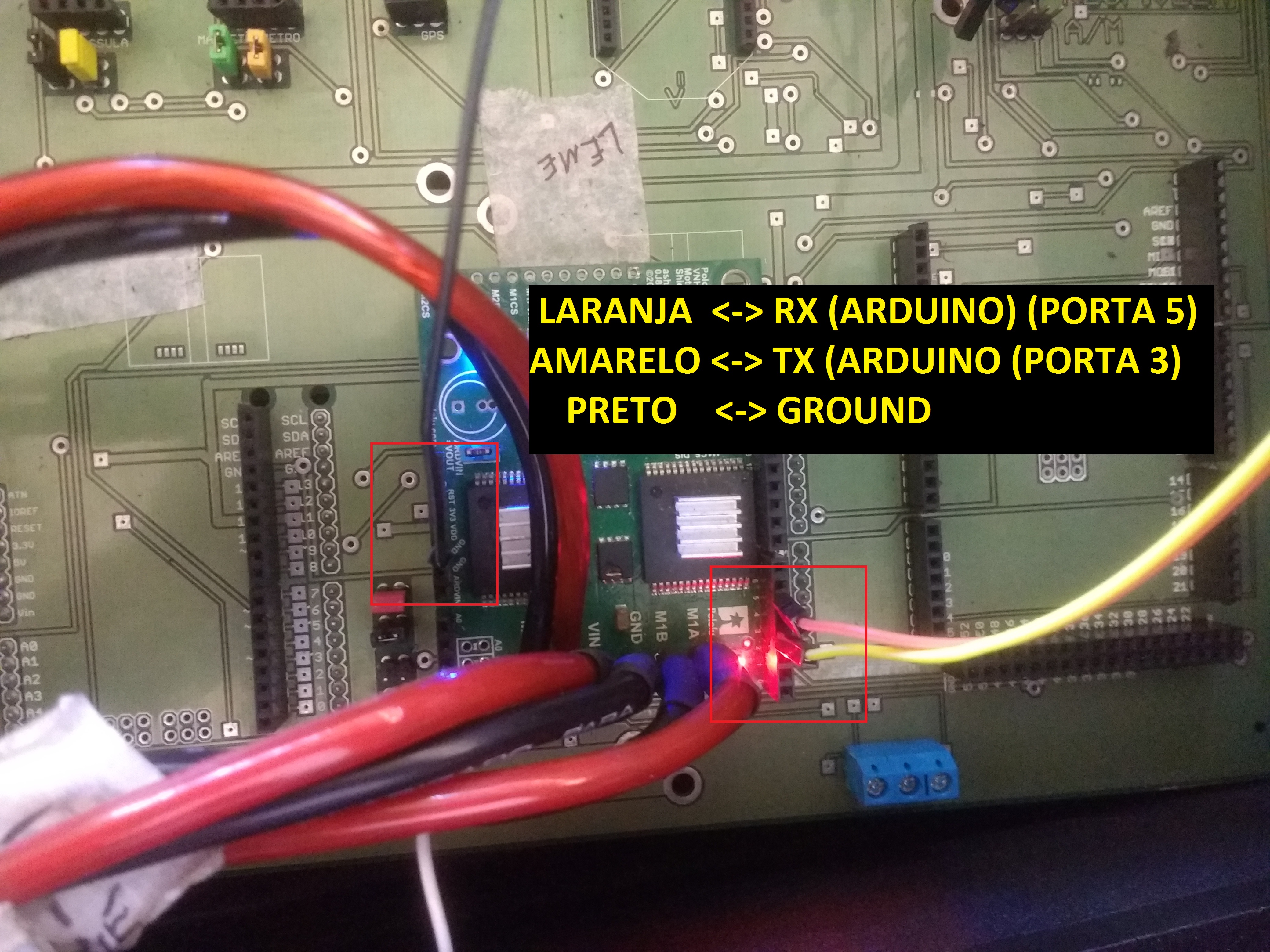
A conexão para comunicação serial é mostrada abaixo
A pixhawk também recebe os sinais do sensores do vento.
Sensores de vento¶
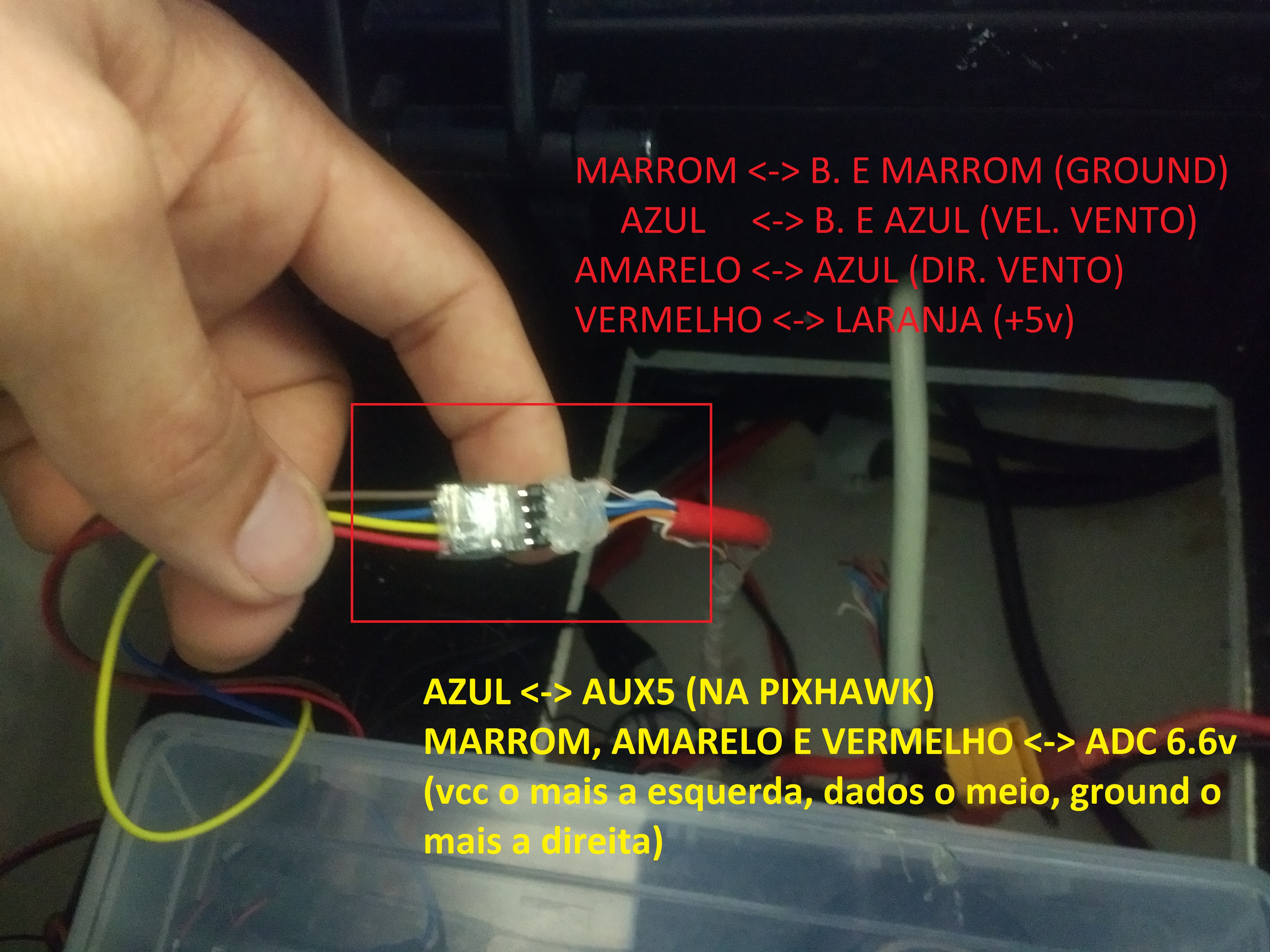
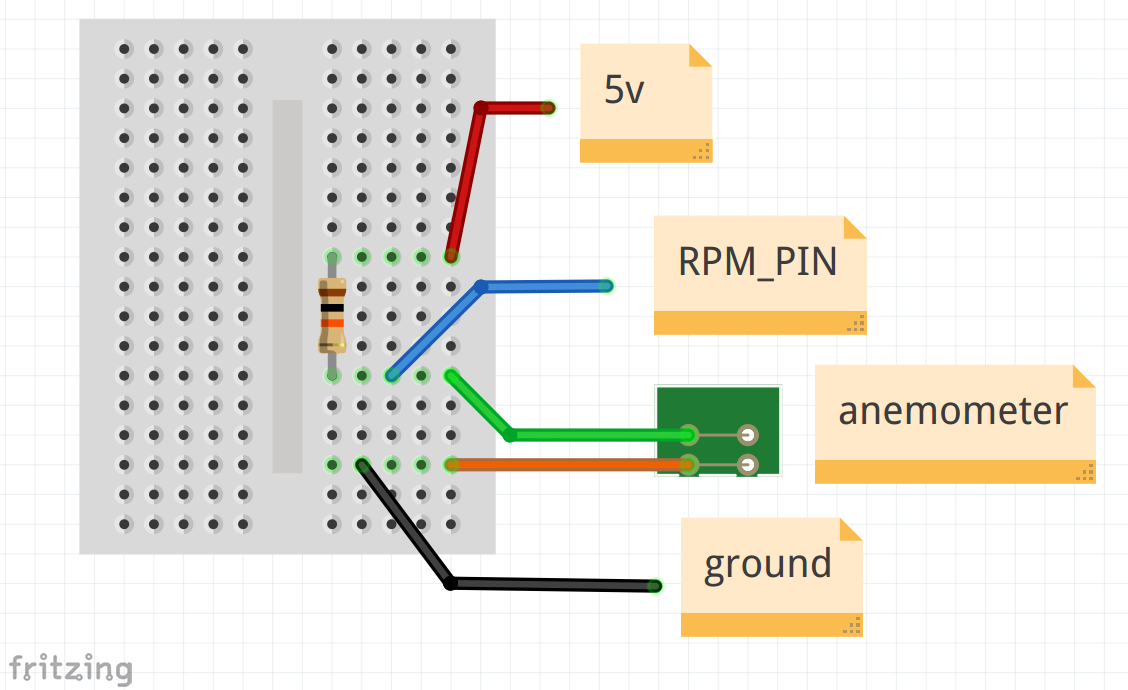
O sensor de direção do vento é composto por um potenciometro de posição absoluta que rotaciona de acordo com a direção do vento. O sensor de velocidade do vento é um conjunto de copos que gira e fecha um circuito funcionando como um botão. O número de clicks indica a velocidade do vento.
A imagem abaixo mostra como os sensores do vento são conectados à pixhawk.
Algumas configurações na pixhawk são necessárias para os sinais lidos dos sensores de vento. Mais detalhes da configuração neste post.
Setup inicial da pixhawk¶
O primeiro passo é encaixar os módulos que vem no kit pixhawk. Com a pixhawk em mãos e montada, baixe o MissionPlanner e também o QGroundControl. Os dois são ground controls: softwares usados para ajudar a carregar o código na pixhawk, configurar os parâmetros, carregar missões e também acompanhar os dados de telemetria. Principalmente, eles serão usados para calibrar os sensores da pixhawk.
Algumas partes são mais fáceis de fazer no MissionPlanner e outras no QGroundControl, então é importante instalar os dois.
Carregando o firmware¶
O código fonte do firmware está em https://github.com/Natalnet/ardupilot.git, no branch nboat. Para compilar siga este tutorial de Setup On Ubuntu até o comando . ~/.profile. Se tudo der certo, use os comandos ./waf configure –board Pixhawk1 e ./waf rover. O firmware estará na pasta ardupilot/build/Pixhawk1/bin com o nome ardupilot.apj.
Instale o MissionPlanner ou o QGroundControl para carregar o firmware na pixhawk. Após carregar o firmware, carregue na pixhawk os parâmetros do arquivo da pasta config_pixhawk/nboat_param. Com isto, o código ardupilot modificado para o nboat estará rodando na pixhawk. Em outro menu será mostrado mais detalhes do código.
Calibrar o imu¶
Esta parte é relativamente direta. Abra o missionplanner. Vá na aba
Calibrar o rádio¶
Calibrar as saídas¶
asdasdad